SMART APPLICATIONS LTD
Track equipment and Monitor Safety

-
Ultra-wideband (UWB) is a radio technology based on the IEEE 802.15.4a and 802.15.4z standards that can enable the very accurate measure of the Time of Flight of the radio signal, leading to centimeter accuracy distance/location measurement.
-
In addition to this unique capability, UWB offers data communication capability while using extremely little energy – enabling coin cell operation for years without needing to be recharged or replaced. By combining accurate location and communication, UWB also offers a new way of securely communicating over wireless, opening the door to new forms of secure transactions.
-
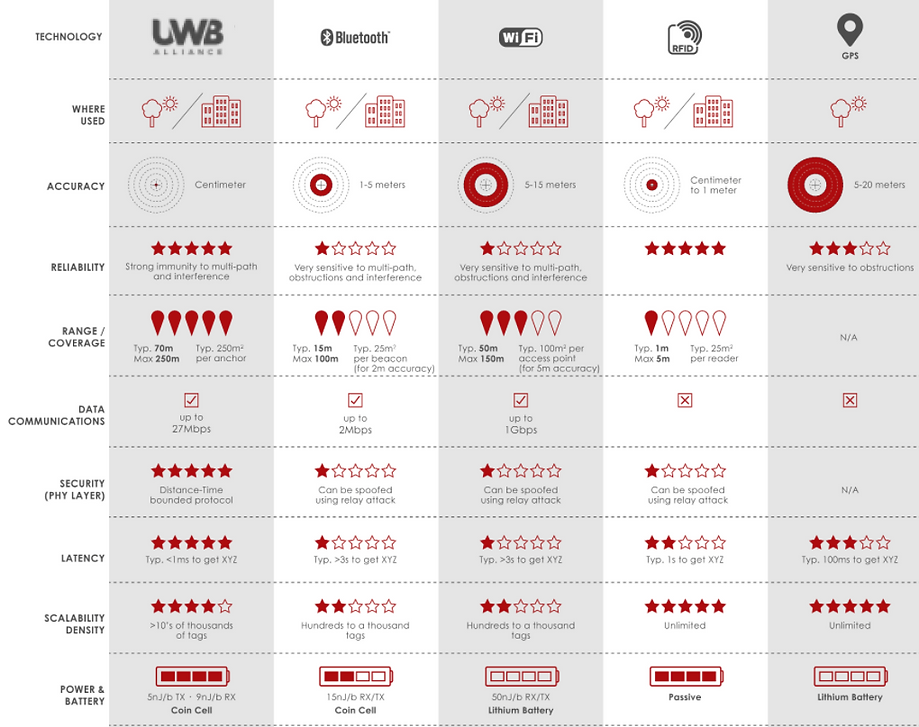
Here are the essential differences between the technologies:
UWB technology capabilities have opened the door to a broad range of applications. As of January 2019, more than 7 million Decawave chipsets have been deployed by more than 40 different verticals, such as:
-
Factories to improve operational efficiencies or improve personnel safety
-
Buildings to deliver turn-by-turn navigation services
-
Cars where distance-bounding protocols are used to build secure communications between the key fob and the car to avoid car theft
-
Sports to deliver real-time performance analytics
-
Drones for flight control
-
Connected homes to control smart devices based on the location of people
UWB leverages Time of Flight (ToF), which is a method for measuring the distance between two radio transceivers by multiplying the Time of Flight of the signal by the speed of light. From this basic principle, UWB technology can be implemented in different ways based on the target applications needs: Two Way Ranging, Time Difference of Arrival (TDoA), or Phase Difference of Arrival (PDoA).
Time Difference of Arrival (TDoA) and Reverse TDoA
The TDoA method is very similar to GPS. Multiple reference points, called anchors, are deployed in a venue and are time synchronized. The mobile devices will beacon, and when an anchor receives the beacon signal it will timestamp it. The timestamps from multiple anchors are then sent back to a central location engine which will run multilateration algorithms based on Time Difference of Arrival of the beacons signals to compute the X, Y, Z of the mobile devices.
Pros:
-
Up to 7 years of battery life for the tag (CR2032 – 0.1Hz update rate)
-
Very high density of devices – in the thousands
Cons:
-
Anchors need to be time synchronized
-
More complex deployment
Two-Way Ranging (TWR)
The TWR method relies on two-way communication between two devices. As they communicate, the devices also measure the Time of Flight of the UWB RF signal between them. By multiplying the round trip time of the signal by the speed of light, and then dividing by 2, you can derive the actual distance between the two devices. If you apply the TWR scheme between two devices, you will get the distance (D) between the two devices. Based on the TWR scheme, you can also implement 2D or even 3D location by measuring the distance between your mobile tags and fixed beacons – this is called triangulation.
Pros:
-
System synchronization is not required
-
Easy deployment
-
Two-way communication enables downlink data and control
Cons:
-
Higher power consumption as devices use two-way communication – months to a year of battery life (use-case dependent)
-
Limited number of mobile devices (in the hundreds)
Phase Difference of Arrival (PDoA)
The PDoA method consists of combining the TWR scheme that delivers the distance between two devices with the measure of the bearing between the two devices. The combination of distance and bearing allows the calculation of the relative position of two devices without any other infrastructure. To do so, one of the devices carries two antennas and is able to measure the Phase Difference of Arrival of the RF signal.
Pros:
-
Reduced infrastructure location scheme
-
Relative positioning between two devices
Cons:
-
Location error is no longer constant, it is a function of the distance between the 2 devices